Por qué falla la localización de robots en entornos sin GNSS
5 de junio de 2026
Los robots autónomos están transformando rápidamente industrias como minería, construcción e inspección de infraestructuras. Desde excavadoras autónomas operando en profundidad hasta robots móviles navegando entornos urbanos complejos, estos sistemas dependen de una capacidad fundamental: saber exactamente dónde están 1. Esta capacidad, conocida como localización, es la base de la navegación autónoma. Sin localización precisa, ni siquiera los sistemas de percepción y planificación más avanzados pueden guiar un robot de forma fiable por su entorno.
Uno de los mayores desafíos de la robótica autónoma es la localización en entornos sin GNSS y con GNSS degradado. Son entornos donde los sistemas de posicionamiento por satélite como GPS, Galileo, GLONASS o BeiDou no están disponibles o son poco fiables. Ejemplos incluyen minas subterráneas, túneles, áreas urbanas densas rodeadas de rascacielos, instalaciones industriales y grandes obras de construcción. En estos entornos, los robots deben depender de sensores a bordo para estimar su posición, y pequeños errores pueden acumularse rápidamente y convertirse en fallos de navegación.
La importancia de la localización en la robótica autónoma
La localización se refiere al proceso de calcular la posición y orientación de un robot en su entorno. Todo sistema autónomo depende de la localización para funciones esenciales como navegación, planificación de rutas, evitar obstáculos, mapeo, y ejecución de tareas.
Los sistemas de posicionamiento por satélite proporcionan a los robots una referencia global de su ubicación. Mientras un robot pueda recibir señales satelitales fiables, puede corregir continuamente los errores que se acumulan de sus sensores a bordo 2. Esto permite al robot mantener una estimación precisa de su posición en largas distancias y períodos prolongados de operación.
Sin embargo, cuando las señales GNSS dejan de estar disponibles, los robots pierden esta referencia externa y dependen de sensores a bordo como LiDAR, cámaras, unidades de medición inercial (IMUs), radar y odometría de ruedas.
¿Qué son los entornos sin GNSS y con GNSS degradado?
Los entornos sin GNSS son ubicaciones donde no hay visibilidad de satélites, y por tanto, no hay recepción GPS. Por otro lado, los entornos con GNSS degradado son áreas donde las señales están disponibles pero no son lo suficientemente precisas para la navegación.
Ejemplos comunes incluyen:
- Minas subterráneas
- Túneles
- Cañones urbanos entre rascacielos
- Instalaciones industriales
- Almacenes
- Obras de construcción
- Bosques densos
- Puertos y terminales de carga
Estos entornos tienen baja visibilidad satelital 3, introduciendo desafíos únicos que hacen la localización precisa significativamente más difícil que en entornos exteriores abiertos.
Deriva de localización en minas subterráneas
La minería subterránea representa uno de los entornos más desafiantes para la navegación autónoma. Como las señales GNSS no pueden penetrar capas de roca y tierra, la maquinaría de minería opera sin acceso a posicionamiento por satélite.
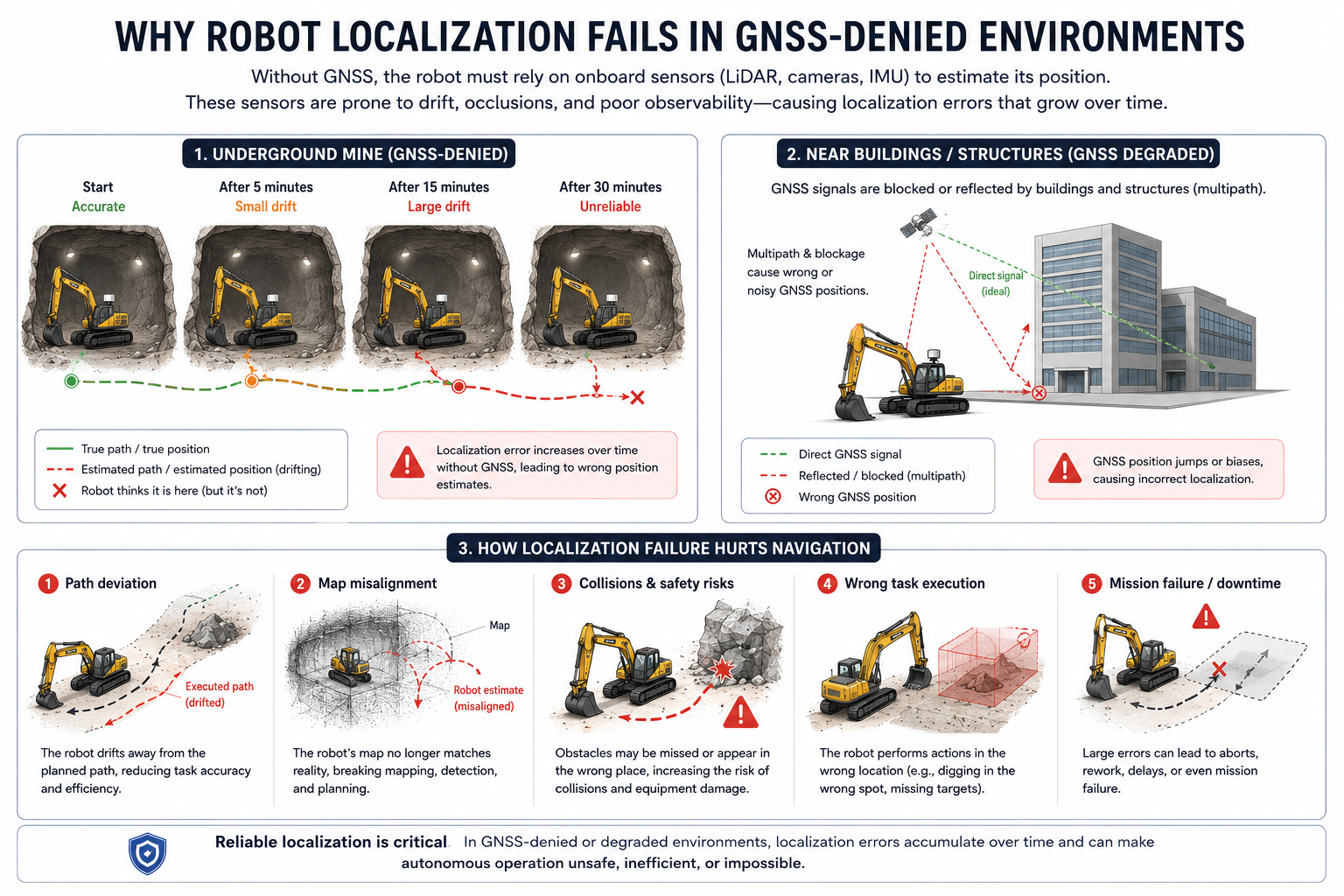
Una excavadora autónoma que entra en un túnel puede comenzar con una estimación de posición precisa 2. Sin embargo, a medida que continúa moviéndose, debe depender de sensores a bordo. Los encoders de ruedas miden el movimiento, los IMUs estiman cambios en velocidad y orientación, y los sistemas de percepción intentan identificar características del entorno.
El problema es que cada sensor contiene algún grado de incertidumbre de medición. El deslizamiento de ruedas, el ruido del sensor, la vibración y los errores de calibración introducen pequeñas imprecisiones en el proceso de localización. Aunque estos errores pueden parecer insignificantes al principio, se acumulan continuamente con el tiempo.
Este fenómeno, conocido como deriva de localización, hace que la posición estimada del robot se desvíe gradualmente de su posición real. Tras operación prolongada, el robot puede creer que ocupa una ubicación a varios metros de la realidad. En un entorno minero lleno de maquinaria, paredes y personal, incluso errores de posicionamiento relativamente pequeños pueden tener consecuencias graves.
Errores de multipath GNSS cerca de edificios
Un desafío diferente pero igualmente significativo ocurre en entornos urbanos.
Aunque las señales satelitales suelen estar disponibles cerca de edificios, no siempre son fiables. Las grandes estructuras de hormigón, acero y vidrio, pueden bloquear o reflejar señales GNSS antes de que lleguen al receptor.
En lugar de recibir una señal directa del satélite, el robot puede recibir una señal reflejada que ha recorrido un camino más largo. Este fenómeno se conoce como propagación multipath.
Como la señal reflejada llega más tarde de lo esperado, el sistema de posicionamiento calcula una ubicación incorrecta. El resultado pueden ser saltos repentinos de posición, sesgos persistentes, o estimaciones de localización inestables.
Para robots autónomos operando cerca de edificios, estas imprecisiones pueden hacer que los sistemas de navegación tomen decisiones basadas en suposiciones incorrectas sobre su posición. Incluso cuando el GNSS parece estar disponible, la calidad de localización puede deteriorarse significativamente debido a reflexiones y bloqueo de señal.
Por qué la localización basada en sensores no es perfecta
Los robots autónomos modernos usan una variedad de sensores para compensar la ausencia de GNSS. Sin embargo, cada sensor tiene sus limitaciones.
Los sistemas LiDAR proporcionan mediciones geométricas muy precisas pero pueden tener dificultades en entornos polvorientos, con humo o niebla. Las cámaras ofrecen información visual rica pero son sensibles a las condiciones de iluminación y oclusiones visuales. Los IMUs proporcionan estimaciones continuas de movimiento pero acumulan deriva con el tiempo. El radar funciona bien en condiciones adversas pero generalmente ofrece menor resolución espacial que el LiDAR.
Como ningún sensor individual es perfecto, los sistemas de localización deben equilibrar continuamente las fortalezas y debilidades de múltiples sensores. En Harsher, utilizamos una fusión entre sensores robusta, que permite la localización independientemente del entorno.
El impacto del fallo de localización en la navegación autónoma
Los errores de localización afectan todos los aspectos de la operación autónoma. A medida que las estimaciones de posición se vuelven menos precisas, el rendimiento de navegación se deteriora y los riesgos de seguridad aumentan.
Una de las consecuencias más inmediatas es la desviación de ruta. Los sistemas de navegación generan rutas basadas en la posición estimada del robot. Si esa estimación es incorrecta, el robot puede desviarse sin saberlo de su ruta planeada. En aplicaciones como minería, construcción y manejo de materiales, incluso pequeñas desviaciones pueden reducir la eficiencia y afectar la precisión de las tareas.
Los fallos de localización también conducen a desalineación del mapa. Los robots autónomos a menudo dependen de mapas detallados para entender su entorno y tomar decisiones de navegación. Cuando la localización deriva 4, las observaciones del sensor ya no se alinean correctamente con las características mapeadas. Los obstáculos pueden aparecer en ubicaciones incorrectas, los puntos de referencia pueden no coincidir con las expectativas, y la representación del entorno del robot se vuelve cada vez más inconsistente.
Otra preocupación mayor es el riesgo de colisión. Los sistemas autónomos toman decisiones basadas en dónde creen estar ubicados. Si esa creencia es incorrecta, el robot puede malinterpretar la ubicación de obstáculos cercanos, maquinaria, infraestructura o personal. Esto puede aumentar la probabilidad de maniobras inseguras e incidentes durante su operación.
Como afecta esto a una excavadora autónoma
La precisión de localización es particularmente crítica para excavadoras autónomas porque sus tareas implican interacción directa con el entorno físico.
Una excavadora que experimenta errores de localización puede excavar en el lugar equivocado, cargar material del área incorrecta o no alcanzar objetivos designados. En proyectos mineros y de construcción a gran escala, incluso pequeñas imprecisiones de posicionamiento pueden resultar en costosa repetición de trabajo, menor productividad y retrasos operativos.
Como las excavadoras operan frecuentemente cerca de equipos costosos, infraestructura y trabajadores humanos, la localización fiable es también un requisito clave de seguridad. Una mala localización puede socavar la efectividad de los sistemas de evitación de colisiones y reducir la confianza en la operación autónoma.
A medida que las industrias minera y de construcción continúan automatizando equipos pesados, el rendimiento de localización se está convirtiendo en uno de los factores principales que determinan el éxito del despliegue autónomo. Nuestro sistema de localización ofrece alta precisión incluso en lugares sin GNSS, permitiendo la operación de maquinaria con mínimo riesgo de fallo.
Soluciones emergentes para localización sin GNSS
Para superar las limitaciones del GNSS, hemos desarrollado tecnologías de localización robustas y precisas.
Nuestra fusión de sensores puede combinar información de LiDAR, radar, IMUs 5 y odometría 6, generando estimaciones de posición más fiables de las que cualquier sensor individual podría proporcionar por sí solo.
Las técnicas de Localización y Mapeo Simultáneas (SLAM) 7 permiten a los robots construir mapas mientras estiman simultáneamente su posición dentro de esos mapas. Los métodos avanzados de localización basados en radar están mejorando el rendimiento en entornos polvorientos y de baja visibilidad, mientras las técnicas de aprendizaje automático ayudan a los robots a reconocer y localizarse contra características ambientales complejas.
Nuestra pipeline de localización y mapeo aprovecha una combinación de estas tecnologías para lograr localización robusta incluso en las condiciones operativas más desafiantes.
Conclusión
La localización es una parte fundamental de la navegación autónoma. Sin una estimación precisa de posición, los robots no pueden planificar rutas, evitar obstáculos, ejecutar tareas u operar de forma segura de manera fiable. Los entornos sin GNSS y con GNSS degradado introducen desafíos porque eliminan o corrompen la información de posicionamiento absoluto de la que tradicionalmente dependen los sistemas autónomos.
En minas subterráneas, los errores de localización se acumulan por deriva del sensor. Cerca de edificios, las señales GNSS pueden bloquearse o reflejarse, creando imprecisiones de posicionamiento. Estos fallos pueden llevar a desviaciones de ruta, desalineación del mapa, colisiones, ejecución incorrecta de tareas y fallo en la navegación.
A medida que los robots autónomos se vuelven cada vez más comunes en minería, construcción, logística y operaciones industriales, resolver el problema de localización seguirá siendo uno de los desafíos más importantes de la robótica. La localización fiable no es simplemente un requisito de navegación — es la base sobre la que se construye una autonomía segura, eficiente y escalable.