LiDAR vs. radar — Por qué la longitud de onda importa en entornos de baja visibilidad
3 de junio de 2026
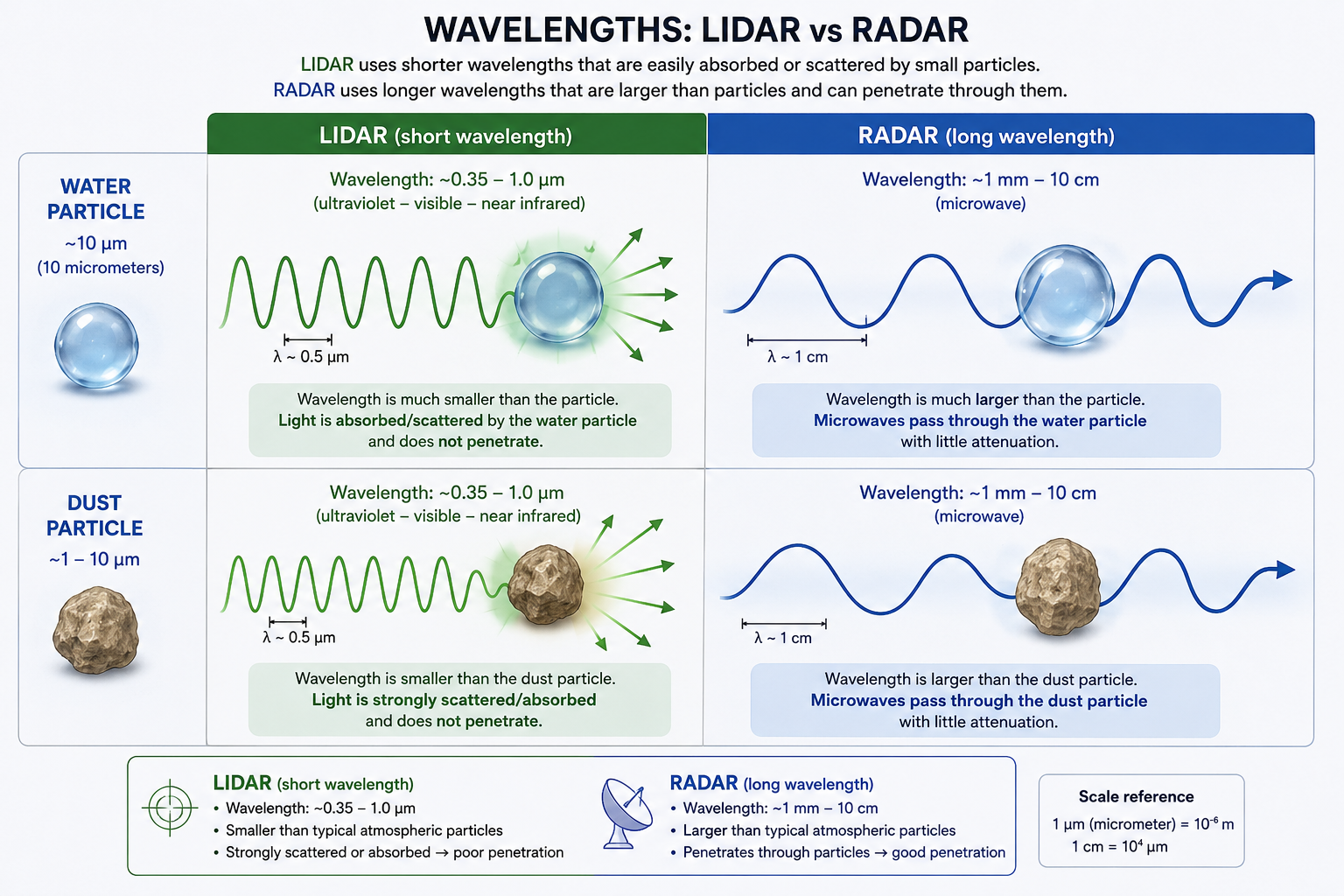
Entender cómo las longitudes de onda electromagnéticas interactúan con las partículas es fundamental para utilizar sensores en condiciones reales hostiles. Los sistemas de radar y LiDAR operan en partes fundamentalmente distintas del espectro electromagnético, y esta diferencia establece directamente su rendimiento en entornos llenos de gotas de agua, polvo, humo o escombros.
LiDAR (Light Detection and Ranging) utiliza ondas cortas, típicamente en el rango de luz visible a infrarrojo (alrededor de 0,3–1,0 µm). Estas longitudes de onda son comparables o menores que partículas atmosféricas comunes como el polvo (1–10 µm) y las gotas de agua (~10 µm). Como resultado, las señales LiDAR se dispersan o absorben al interactuar con estas partículas 1. Esto provoca atenuación de señal, menor alcance y precisión degradada en entornos con niebla, lluvia, humo, o polvo en suspensión.
Radar (Radio Detection and Ranging) 2, al contrario, opera a longitudes de onda mucho mayores 3, típicamente en el rango de milímetros a centímetros (1 mm a 10 cm). Estas longitudes de onda son mayores que la mayoría de partículas ambientales. Por este desajuste de tamaño, las ondas de radar se ven menos afectadas por la dispersión y pueden penetrar nubes de polvo, niebla, lluvia e incluso follaje con relativamente baja atenuación.
Esta distinción física se vuelve crítica en entornos extremos.
Operaciones mineras y en canteras
Las minas y canteras se caracterizan por densas nubes de polvo generadas por perforación, voladuras y maquinaria pesada. Los sistemas LiDAR tienen dificultades en estas condiciones porque las partículas de polvo dispersan la luz láser, reduciendo visibilidad y precisión 7. Los sistemas de radar, sin embargo, mantienen detección y medición de distancia fiables, permitiendo una navegación más segura de vehículos autónomos y mejor monitorización de equipos y terreno.
Aeropuertos y seguridad aeronáutica
Los aeropuertos deben operar en todas las condiciones meteorológicas, incluyendo niebla densa, lluvia y nieve. Los sistemas basados en LiDAR pueden perder efectividad en escenarios de baja visibilidad debido a la dispersión por gotas de agua 4. El radar, con sus longitudes de onda mayores, penetra estas condiciones de forma efectiva, siendo esencial para detección de aeronaves, monitorización de movimiento en tierra y sistemas de anti-colisiones.
Entornos forestales e incendios
Los bosques presentan entornos complejos con follaje, humedad, humo 5 y partículas en suspensión. Durante incendios forestales, las partículas de humo degradan severamente el rendimiento del LiDAR 6. Los sistemas de radar pueden penetrar humo y cobertura vegetal parcial, proporcionando detección más consistente de terreno, obstáculos y movimiento. Esta capacidad es crítica para operaciones de extinción, vigilancia y navegación autónoma en zonas boscosas.
Entornos industriales y exteriores hostiles
En entornos donde las partículas en suspensión fluctúan rápidamente — como obras de construcción, puertos e industria pesada — la fiabilidad del sensor se convierte en un factor limitante. El LiDAR ofrece mapeo de alta resolución en condiciones claras pero se vuelve poco fiable cuando aumenta la densidad de partículas 7. El radar proporciona sensado robusto de menor resolución que permanece estable independientemente de la interferencia ambiental.
Conclusión
La diferencia de longitud de onda entre LiDAR y radar no es un simple detalle técnico; define sus límites operativos. El LiDAR destaca en entornos limpios donde se requiere alta precisión, mientras el radar domina en condiciones hostiles y de baja visibilidad donde la penetración y la fiabilidad son críticas. Los sistemas de sensado modernos combinan cada vez más ambas tecnologías para equilibrar resolución y robustez, asegurando rendimiento en un amplio rango de condiciones ambientales.