Localización y mapeo — La base de los robots autónomos
3 de junio de 2026
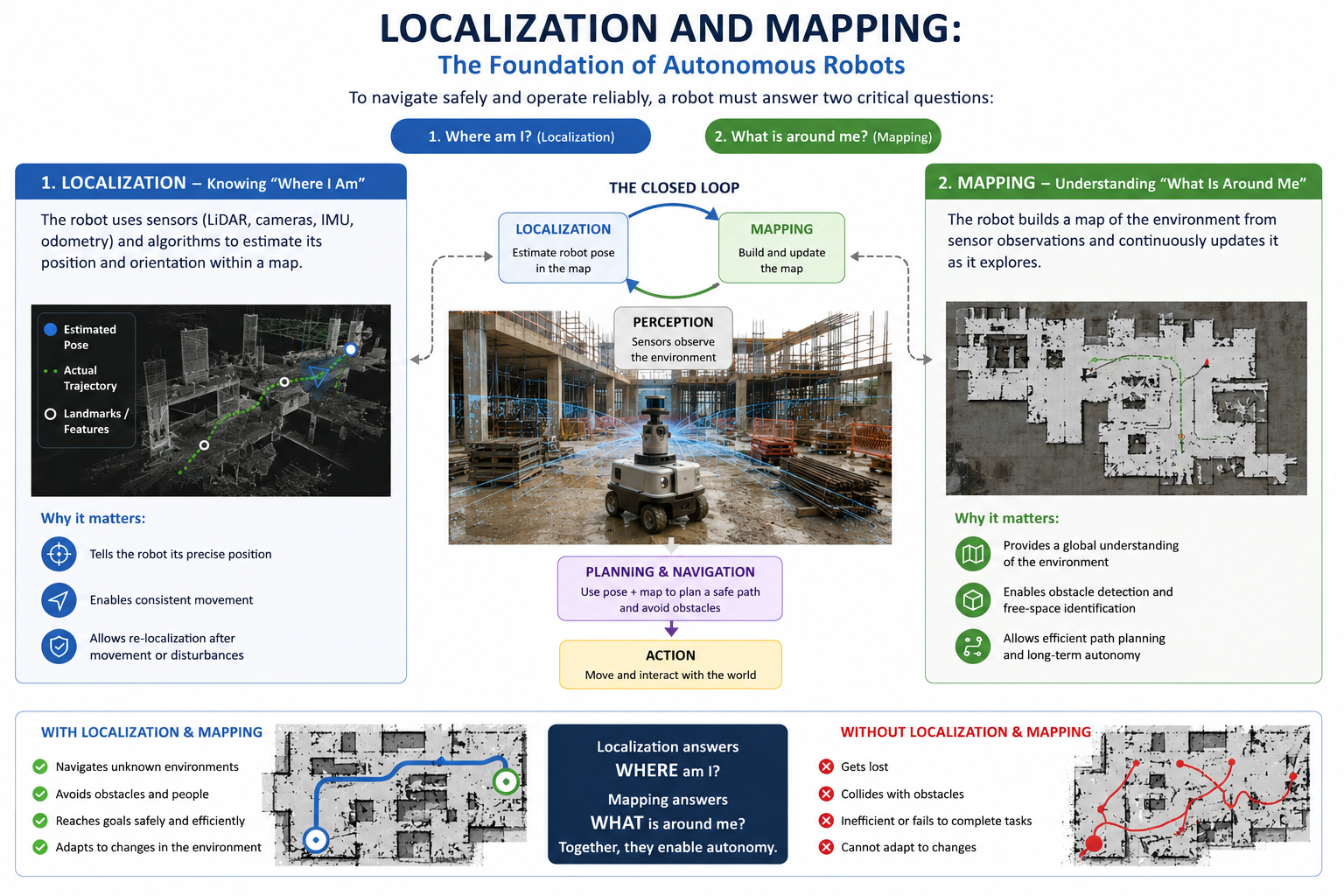
Los robots autónomos dependen de su ubicación y posicionamiento para operar de forma segura y eficiente. Dos capacidades fundamentales lo hacen posible: la localización, y el mapeo 1. Estos sistemas definen cómo un robot determina su posición en el espacio y cómo construye una representación interna de su entorno. Juntas forman la base de SLAM (Simultaneous Localization and Mapping), central en la robótica moderna.
La localización es el proceso de estimar la pose del robot —su posición y orientación— dentro de un marco de referencia o mapa. Responde a la pregunta: «¿Dónde estoy?» Los robots lo logran fusionando múltiples modalidades sensoriales, incluyendo LiDAR, cámaras, IMUs y odometría de ruedas. Cada sensor aporta información parcial: el LiDAR proporciona estructura geométrica, las cámaras extraen características visuales, los IMUs capturan movimiento inercial y la odometría rastrea el desplazamiento incremental. Como cada medición tiene ruido, la localización depende de métodos de estimación probabilística para corregir continuamente el error acumulado y mantener una estimación precisa de su estado.
El mapeo es el proceso complementario de construir y actualizar una representación del entorno. Responde a la pregunta: «¿Qué hay a mi alrededor?» Mientras el robot explora, agrega observaciones en mapas estructurados como nubes de puntos o representaciones basadas en características de los objetos 2. Estos mapas se mejoran con el tiempo a medida que se integran nuevos datos, permitiendo al sistema mejorar precisión y consistencia durante la operación.
La interacción entre localización y mapeo forma un bucle de retroalimentación cerrado conocido como SLAM. La localización depende del mapa para estimar la posición, mientras el mapeo depende de una localización precisa para colocar correctamente las observaciones en el espacio 3. Esta dependencia mutua es lo que permite a los robots explorar entornos desconocidos sin sistemas de posicionamiento externos como el GPS.
SLAM en sistemas de navegación autónoma
El SLAM opera como parte de un pipeline más amplio de percepción-planificación-acción. Primero, los sensores capturan datos ambientales. Luego, la localización estima la ubicación del robot mientras el mapeo construye o actualiza el modelo del entorno. Este estado combinado lo utilizan los sistemas de planificación para calcular trayectorias seguras, evitar obstáculos, y optimizar rutas hacia objetivos. Finalmente, el robot ejecuta comandos de movimiento e interactúa con el entorno, alimentando nuevos datos de vuelta al sistema.
Este bucle continuo permite adaptación en tiempo real. A medida que el entorno cambia o el robot se mueve a áreas previamente no vistas, tanto la localización como el mapeo se ajustan dinámicamente para mantener la estabilidad operativa.
Almacenes y entornos interiores estructurados
En entornos estructurados como almacenes, la localización y mapeo permiten a los robots navegar pasillos estrechos, evitar obstáculos dinámicos y coordinar movimiento con otras máquinas 4. Los mapas de alta densidad permiten planificación de rutas precisa, mientras una localización precisa asegura repetibilidad en tareas como recogida y transporte de objetos.
Robótica exterior y terreno no estructurado
En entornos exteriores como minas, canteras y minas a cielo abierto, donde los puntos de referencia pueden ser escasos y el terreno cambia frecuentemente, el SLAM se vuelve crítico. Los robots deben depender de la fusión de sensores para mantener estimaciones de posición mientras amplían su modelo ambiental. Esta capacidad es esencial para vehículos autónomos, robots agrícolas y sistemas de exploración planetaria.
Robótica aérea y móvil
Los drones y robots móviles operan en espacios tridimensionales donde el GPS puede ser poco fiable o no estar disponible 5. El SLAM permite a estos sistemas mantener conciencia espacial en interiores, subterráneos o en entornos sin GPS. El mapeo apoya la evitación de obstáculos en tiempo real, mientras la localización asegura estabilidad de vuelo y precisión de trayectoria.
Limitaciones del sistema sin SLAM
Sin localización y cartografía, los sistemas autónomos pierden coherencia espacial. El robot no puede determinar su posición ni interpretar su entorno de forma consistente. Esto conduce a fallos de navegación, mayor riesgo de colisión, incapacidad de recuperarse de perturbaciones y pérdida completa de adaptabilidad ambiental.
Conclusión
La localización y el mapeo no son subsistemas independientes sino componentes estrechamente acoplados que definen la autonomía robótica 6. La localización proporciona autoconciencia espacial, mientras la cartografía construye comprensión del entorno. Su integración mediante SLAM permite a los robots percibir, razonar y actuar en entornos dinámicos sin guía externa. Esta base es lo que transforma los sistemas robóticos de máquinas reactivas en agentes autónomos capaces de operar en el mundo real.