Lokalisierung und Kartierung — Die Grundlage autonomer Roboter
3. Juni 2026
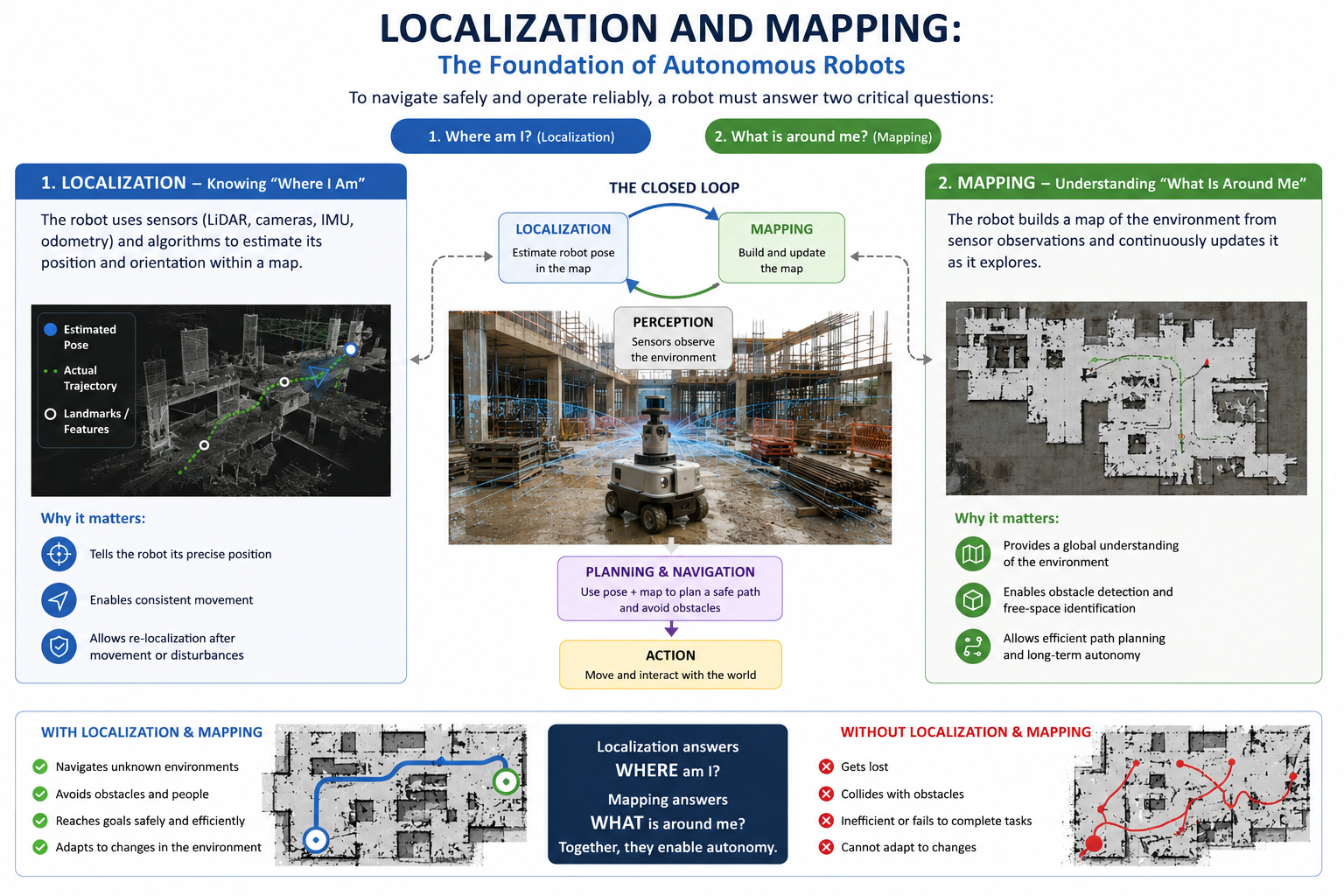
Autonome Roboter sind auf Umgebungsverständnis und Selbstwahrnehmung angewiesen, um sicher und effizient zu arbeiten. Zwei grundlegende Fähigkeiten ermöglichen dies: Lokalisierung und Kartierung 1. Sie bestimmen, wie ein Roboter seine Position im Raum ermittelt und wie er eine interne Repräsentation seiner Umgebung aufbaut. Zusammen bilden sie die Grundlage von SLAM (Simultaneous Localization and Mapping), das im modernen Robotik zentral ist.
Lokalisierung ist der Prozess der Schätzung der Roboterpose — Position und Orientierung — in einem Referenzrahmen oder einer Karte. Sie beantwortet die Frage: „Wo bin ich?" Roboter erreichen dies durch Fusion mehrerer Sensormodalitäten, darunter LiDAR, Kameras, IMUs und Radodometrie. Jeder Sensor liefert Teilinformationen: LiDAR liefert geometrische Struktur, Kameras extrahieren visuelle Merkmale, IMUs erfassen Trägheitsbewegung und Odometrie verfolgt inkrementelle Verschiebung. Da jede Messung verrauscht ist, nutzt Lokalisierung probabilistische Schätzverfahren, um Drift fortlaufend zu korrigieren und eine genaue Poseschätzung zu halten.
Kartierung ist der komplementäre Prozess des Aufbaus und der Aktualisierung einer Umgebungsrepräsentation. Sie beantwortet die Frage: „Was ist um mich herum?" Beim Erkunden aggregiert der Roboter Sensorbeobachtungen zu strukturierten Karten wie Belegungsgittern, Punktwolken oder merkmalsbasierten Repräsentationen 2. Diese Karten werden mit neuen Daten verfeinert, sodass das System während des Betriebs Genauigkeit und Konsistenz verbessert.
Die Wechselwirkung zwischen Lokalisierung und Kartierung bildet eine geschlossene Rückkopplungsschleife, bekannt als SLAM. Lokalisierung hängt von der Karte ab, um die Position zu schätzen, während Kartierung von genauer Lokalisierung abhängt, um Beobachtungen korrekt im Raum zu platzieren 3. Diese gegenseitige Abhängigkeit ermöglicht es Robotern, unbekannte Umgebungen ohne externe Positionierungssysteme wie GPS zu erkunden.
SLAM in autonomen Navigationssystemen
SLAM arbeitet als Teil einer größeren Wahrnehmungs-Planungs-Aktions-Pipeline. Zuerst erfassen Sensoren Rohdaten der Umgebung. Dann schätzt die Lokalisierung die Roboterpose, während die Kartierung das Umgebungsmodell erstellt oder aktualisiert. Dieser kombinierte Zustand wird von Planungssystemen genutzt, um sichere Trajektorien zu berechnen, Hindernisse zu vermeiden und Pfade zu Zielen zu optimieren. Schließlich führt der Roboter Bewegungsbefehle aus und interagiert mit der Umgebung, wobei neue Sensordaten zurück in das System fließen.
Diese kontinuierliche Schleife ermöglicht Echtzeitanpassung. Wenn sich die Umgebung ändert oder der Roboter in bisher ungesehene Bereiche vordringt, passen sich Lokalisierung und Kartierung dynamisch an, um die Betriebsstabilität zu erhalten.
Lagerhallen und strukturierte Innenumgebungen
In strukturierten Umgebungen wie Lagerhallen ermöglichen Lokalisierung und Kartierung Navigation in engen Gängen, Vermeidung dynamischer Hindernisse und Koordination mit anderen Maschinen 4. Hochauflösende Karten erlauben präzise Pfadplanung, während genaue Lokalisierung Wiederholbarkeit bei Aufgaben wie Kommissionierung und Transport sicherstellt.
Outdoor-Robotik und unstrukturiertes Gelände
In Außenumgebungen wie Minen, Steinbrüchen und Tagebauen, wo Landmarken spärlich sein können und sich das Gelände häufig ändert, wird SLAM kritisch. Roboter müssen stark auf Sensorfusion setzen, um Positionsschätzungen zu halten und gleichzeitig ihr Umgebungsmodell zu erweitern. Diese Fähigkeit ist essenziell für autonome Fahrzeuge, Agrarroboter und planetare Erkundungssysteme.
Luft- und Mobilrobotik
Drohnen und mobile Roboter arbeiten in dreidimensionalen Räumen, in denen GPS unzuverlässig oder nicht verfügbar sein kann 5. SLAM ermöglicht diesen Systemen räumliches Bewusstsein in Innenräumen, unter Tage oder in GPS-freien Umgebungen. Kartierung unterstützt Hindernisvermeidung in Echtzeit, während Lokalisierung Flugstabilität und Trajektoriengenauigkeit sicherstellt.
Systemgrenzen ohne SLAM
Ohne Lokalisierung und Kartierung verlieren autonome Systeme räumliche Kohärenz. Der Roboter kann seine Position nicht bestimmen oder seine Umgebung konsistent interpretieren. Das führt zu Navigationsausfällen, erhöhtem Kollisionsrisiko, Unfähigkeit zur Erholung nach Störungen und vollständigem Verlust der Umgebungsanpassungsfähigkeit.
Fazit
Lokalisierung und Kartierung sind keine unabhängigen Subsysteme, sondern eng gekoppelte Komponenten, die robotische Autonomie definieren 6. Lokalisierung liefert räumliches Selbstbewusstsein, Kartierung konstruiert Umgebungsverständnis. Ihre Integration durch SLAM ermöglicht Robotern, in dynamischen Umgebungen ohne externe Führung zu wahrnehmen, zu schlussfolgern und zu handeln. Diese Grundlage verwandelt Robotersysteme von reaktiven Maschinen in autonome Agenten, die dauerhaften Einsatz in der realen Welt leisten können.