Localization and Mapping — The Foundation of Autonomous Robots
June 3, 2026
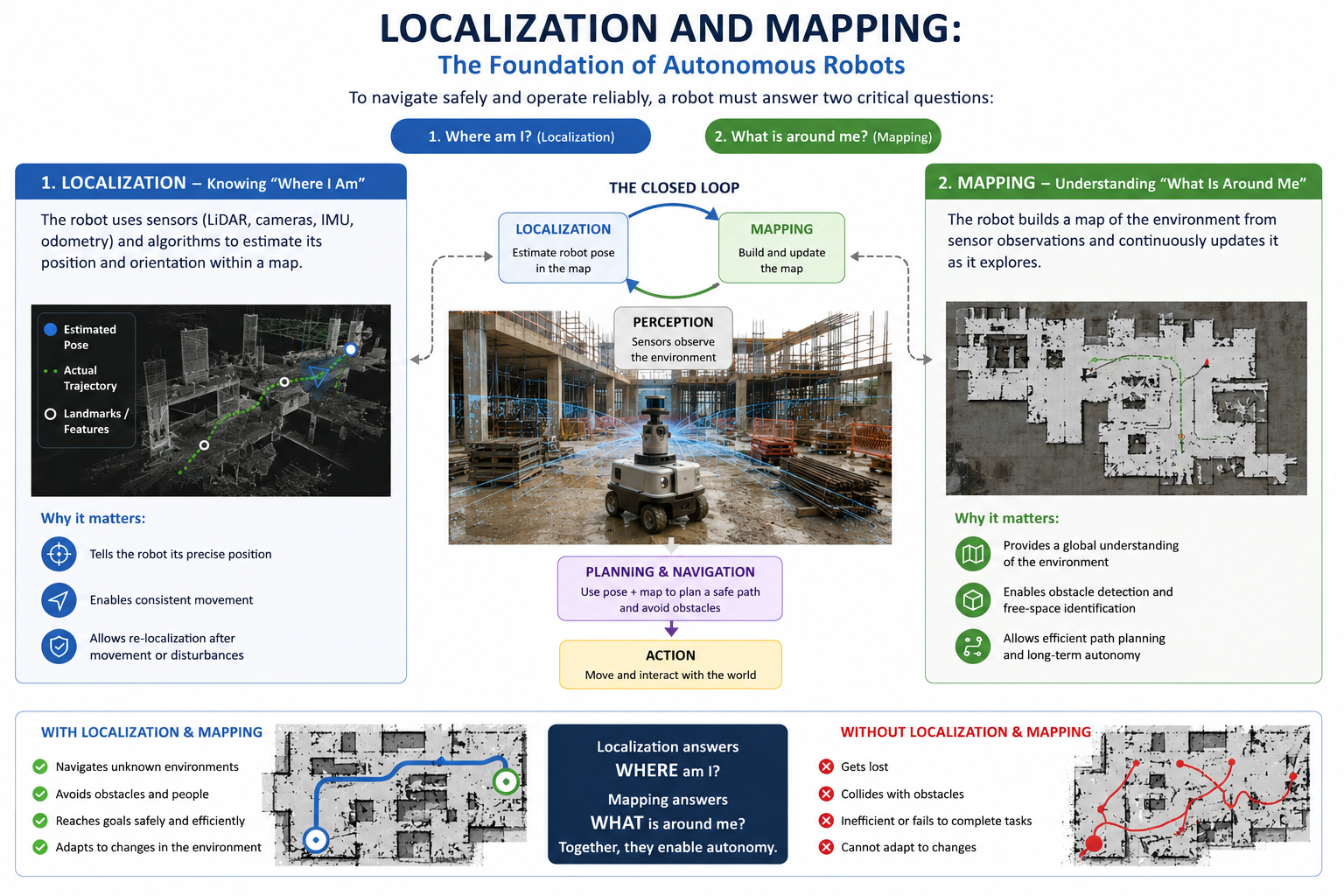
Autonomous robots rely on environmental understanding and self-awareness to operate safely and efficiently. Two foundational capabilities enable this: localization and mapping 1. These systems define how a robot determines its position in space and how it constructs an internal representation of its surroundings. Together, they form the basis of SLAM (Simultaneous Localization and Mapping), which is central to modern robotics.
Localization is the process of estimating a robot's pose—its position and orientation—within a reference frame or map. It answers the question: "Where am I?" Robots achieve this by fusing multiple sensor modalities, including LiDAR, cameras, IMUs, and wheel odometry. Each sensor contributes partial information: LiDAR provides geometric structure, cameras extract visual features, IMUs capture inertial motion, and odometry tracks incremental displacement. Because each measurement is noisy, localization relies on probabilistic estimation methods to continuously correct drift and maintain an accurate pose estimate.
Mapping is the complementary process of building and updating a representation of the environment. It answers the question: "What is around me?" As the robot explores, it aggregates sensor observations into structured maps such as occupancy grids, point clouds, or feature-based representations 2. These maps are refined over time as new data is integrated, allowing the system to improve accuracy and consistency during operation.
The interaction between localization and mapping forms a closed feedback loop known as SLAM. Localization depends on the map to estimate position, while mapping depends on accurate localization to place observations correctly in space 3. This mutual dependency is what enables robots to explore unknown environments without external positioning systems like GPS.
SLAM in Autonomous Navigation Systems
SLAM operates as part of a larger perception–planning–action pipeline. First, sensors capture raw environmental data. Next, localization estimates the robot's pose while mapping constructs or updates the environment model. This combined state is then used by planning systems to compute safe trajectories, avoid obstacles, and optimize paths toward goals. Finally, the robot executes motion commands and interacts with the environment, feeding new sensor data back into the system.
This continuous loop enables real-time adaptation. As the environment changes or as the robot moves into previously unseen areas, both localization and mapping adjust dynamically to maintain operational stability.
Warehouse and Structured Indoor Environments
In structured environments such as warehouses, localization and mapping enable robots to navigate narrow aisles, avoid dynamic obstacles, and coordinate movement with other machines 4. High-density maps allow precise path planning, while accurate localization ensures repeatability in tasks such as picking and transporting objects.
Outdoor Robotics and Unstructured Terrain
In outdoor environments such as mines, quarries and open pits, where landmarks may be sparse and terrain changes frequently, SLAM becomes critical. Robots must rely heavily on sensor fusion to maintain position estimates while simultaneously expanding their environmental model. This capability is essential for autonomous vehicles, agricultural robots, and planetary exploration systems.
Aerial and Mobile Robotics
Drones and mobile robots operate in three-dimensional spaces where GPS may be unreliable or unavailable 5. SLAM enables these systems to maintain spatial awareness indoors, underground, or in GPS-denied environments. Mapping supports obstacle avoidance in real time, while localization ensures flight stability and trajectory accuracy.
System Limitations Without SLAM
Without localization and mapping, autonomous systems lose spatial coherence. The robot cannot determine its position or interpret its surroundings consistently. This leads to navigation failures, increased collision risk, inability to recover from disturbances, and complete loss of environmental adaptability.
Conclusion
Localization and mapping are not independent subsystems but tightly coupled components that define robotic autonomy 6. Localization provides self-awareness in space, while mapping constructs environmental understanding. Their integration through SLAM enables robots to perceive, reason, and act in dynamic environments without external guidance. This foundation is what transforms robotic systems from reactive machines into autonomous agents capable of sustained real-world operation. For how SLAM connects to the rest of a robot's software stack, see our article on how localization and mapping interact with every robot component.