Why Robot Localization Fails in GNSS-Denied Environments
June 5, 2026
Autonomous robots are rapidly transforming industries such as mining, construction, and infrastructure inspection. From autonomous excavators operating deep underground to mobile robots navigating complex urban environments, these systems depend on one fundamental capability: knowing exactly where they are 1. This capability, known as localization, is the foundation of autonomous navigation. Without accurate localization, even the most advanced perception and planning systems cannot reliably guide a robot through its environment.
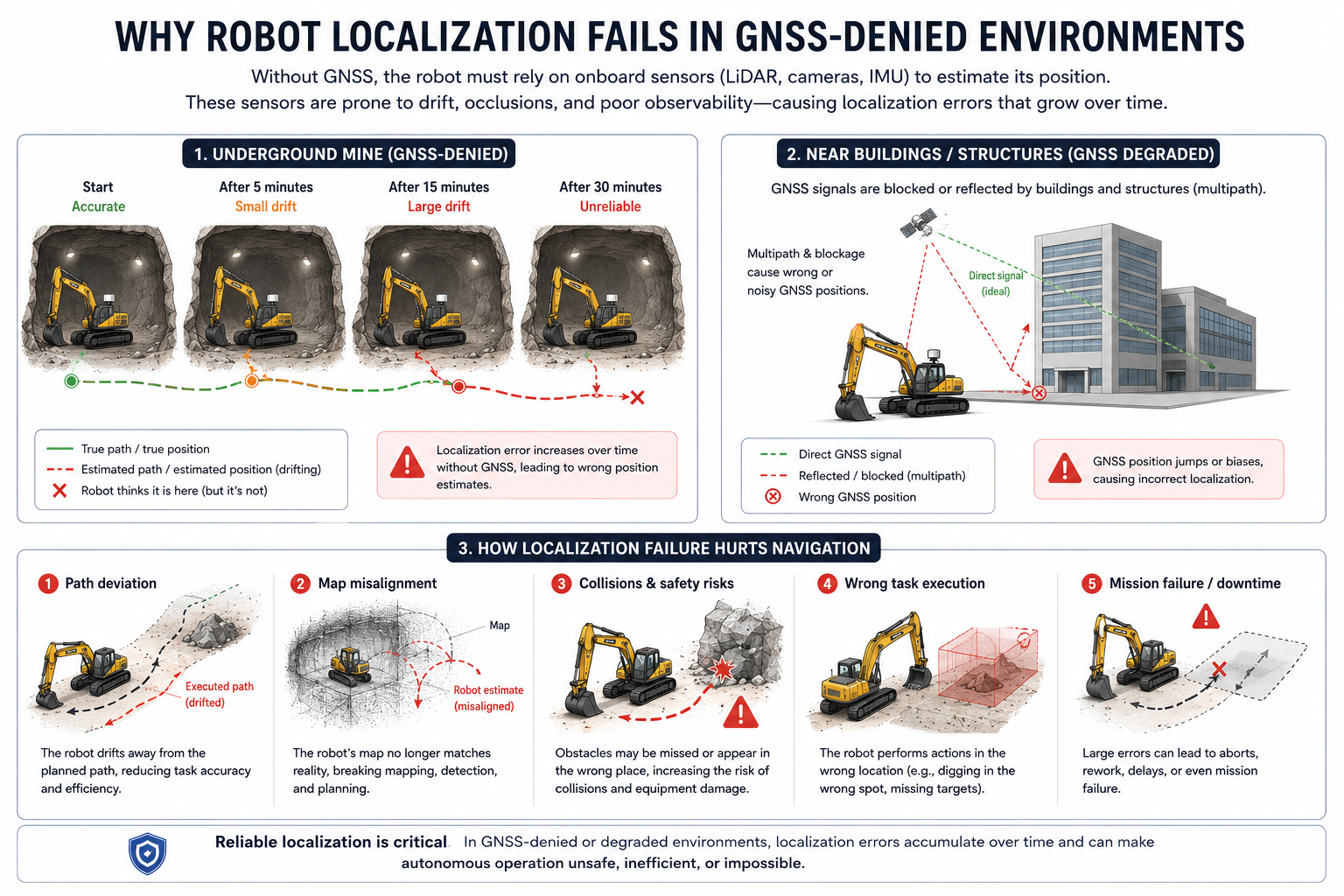
One of the greatest challenges facing autonomous robotics today is localization in GNSS-denied and GNSS-degraded environments. These are environments where satellite-based positioning systems such as GPS, Galileo, GLONASS, or BeiDou are unavailable, unreliable, or severely degraded. Examples include underground mines, tunnels, dense urban areas surrounded by tall buildings, industrial facilities, and large construction sites. In these environments, robots must rely on onboard sensors to estimate their position, and small errors can quickly accumulate into major navigation failures.
The Importance of Localization in Autonomous Robotics
Localization refers to the process of determining a robot's position and orientation within its environment. Every autonomous system depends on localization to perform essential functions such as navigation, path planning, obstacle avoidance, mapping, and task execution.
Satellite positioning systems provide robots with an absolute reference for their location. As long as a robot can receive reliable satellite signals, it can continuously correct errors that accumulate from its onboard sensors 2. This allows the robot to maintain an accurate estimate of its position over long distances and extended periods of operation.
However, when GNSS signals become unavailable, robots lose this external reference and must depend entirely on local sensing technologies such as LiDAR, cameras, inertial measurement units (IMUs), radar, and wheel odometry. In low-visibility conditions, LiDAR performance degrades significantly, making sensor fusion and robust SLAM even more important.
What Are GNSS-Denied and GNSS-Degraded Environments?
GNSS-denied environments are locations where satellite signals cannot be received at all, while GNSS-degraded environments are areas where signals are available but suffer from significant inaccuracies.
Common examples include:
- Underground mines
- Tunnels
- Urban canyons between tall buildings
- Industrial facilities
- Warehouses
- Construction sites
- Dense forests
- Ports and shipping terminals
These environments have low satellite visibility 3, introducing unique challenges that make accurate localization significantly more difficult than in open outdoor settings.
Localization Drift in Underground Mines
Underground mining represents one of the most challenging environments for autonomous navigation. Since GNSS signals cannot penetrate layers of rock and earth, mining equipment operates without access to satellite-based positioning.
An autonomous excavator entering a tunnel may begin with an accurate position estimate. However, as it continues moving, it must rely entirely on onboard sensors. Wheel encoders measure movement, IMUs estimate changes in velocity and orientation, and perception systems attempt to identify environmental features.
The problem is that every sensor contains some degree of measurement uncertainty. Wheel slip, sensor noise, vibration, and calibration errors introduce small inaccuracies into the localization process. While these errors may seem insignificant at first, they accumulate continuously over time.
This phenomenon, known as localization drift, causes the robot's estimated position to gradually diverge from its true position. After extended operation, the robot may believe it occupies a location that is several meters away from reality. In a mining environment filled with machinery, walls, and personnel, even relatively small positioning errors can have serious consequences. It is therefore crucial that the onboard localization system provides an accurate estimatioj of the vehicle's position and orientation.
GNSS Multipath Errors Near Buildings
A different but equally significant challenge occurs in urban environments.
Although satellite signals are often available near buildings, they are not always reliable. Large structures made of concrete, steel, and glass can block or reflect GNSS signals before they reach the receiver.
Instead of receiving a direct signal from a satellite, the robot may receive a reflected signal that has traveled a longer path. This phenomenon is known as multipath propagation.
Because the reflected signal arrives later than expected, the positioning system calculates an incorrect location. The result can be sudden position jumps, persistent biases, or highly unstable localization estimates.
For autonomous robots operating near buildings, these inaccuracies can cause navigation systems to make decisions based on incorrect assumptions about their position. Even when GNSS appears to be available, localization quality can deteriorate significantly due to signal reflections and blockage.
Why Sensor-Based Localization Is Not Perfect
Modern autonomous robots use a variety of sensors to compensate for the absence of GNSS. However, each sensing technology has limitations.
LiDAR systems provide highly accurate geometric measurements but can struggle in dusty, smoky, or foggy environments. Cameras offer rich visual information but are sensitive to lighting conditions and visual occlusions. IMUs provide continuous motion estimates but accumulate drift over time. Radar performs well in adverse conditions but generally offers lower spatial resolution than LiDAR.
Because no individual sensor is perfect, localization systems must continuously balance the strengths and weaknesses of multiple sensing modalities. Even sophisticated sensor fusion algorithms can experience failures when environmental conditions become particularly challenging.
The Impact of Localization Failure on Autonomous Navigation
Localization errors affect every aspect of autonomous operation. As position estimates become less accurate, navigation performance deteriorates and safety risks increase.
One of the most immediate consequences is path deviation. Navigation systems generate routes based on the robot's estimated position. If that estimate is incorrect, the robot may unknowingly drift away from its intended path. In applications such as mining, construction, and material handling, even small deviations can reduce efficiency and compromise task accuracy.
Localization failures also lead to map misalignment. Autonomous robots often rely on detailed maps to understand their surroundings and make navigation decisions. When localization drifts 4, sensor observations no longer align correctly with mapped features. Obstacles may appear in incorrect locations, landmarks may not match expectations, and the robot's representation of the environment becomes increasingly inconsistent.
Another major concern is collision risk. Autonomous systems make decisions based on where they believe they are located. If that belief is incorrect, the robot may misinterpret the location of nearby obstacles, machinery, infrastructure, or personnel. This can increase the likelihood of unsafe maneuvers and operational incidents.
The Consequences for Autonomous Excavators
Localization accuracy is particularly critical for autonomous excavators because their tasks involve direct interaction with the physical environment.
An excavator that experiences localization errors may dig in the wrong location, load material from the wrong area, or fail to reach designated targets. In large-scale mining and construction projects, even small positioning inaccuracies can result in costly rework, reduced productivity, and operational delays.
Because excavators frequently operate near expensive equipment, infrastructure, and human workers, reliable localization is also a key safety requirement. Poor localization can undermine the effectiveness of collision avoidance systems and reduce confidence in autonomous operation.
As the mining and construction industries continue to automate heavy equipment, localization performance is becoming one of the primary factors determining the success of autonomous deployment.
Emerging Solutions for GNSS-Denied Localization
To overcome the limitations of GNSS, we have developed robust and accurate localization technologies.
Our sensor fusion can combine information from LiDAR, radar, IMUs 5, and wheel odometry 6, generating more reliable position estimates than any individual sensor could provide on its own.
Simultaneous Localization and Mapping (SLAM) 7 techniques enable robots to build maps while simultaneously estimating their position within those maps. Advanced radar-based localization methods are improving performance in dusty and low-visibility environments, while machine learning techniques are helping robots recognize and localize against complex environmental features.
Our localization and mapping pipeline exploits a combination of these technologies to achieve robust localization even in the most challenging operating conditions.
Conclusion
Localization is the cornerstone of autonomous navigation. Without an accurate estimate of position, robots cannot reliably plan paths, avoid obstacles, execute tasks, or operate safely. GNSS-denied and GNSS-degraded environments introduce significant challenges because they remove or corrupt the absolute positioning information that autonomous systems traditionally depend upon.
In underground mines, localization errors accumulate through sensor drift. Near buildings, GNSS signals can be blocked or reflected, creating substantial positioning inaccuracies. These failures can lead to path deviations, map misalignment, collisions, incorrect task execution, and mission failure.
As autonomous robots become increasingly common in mining, construction, logistics, and industrial operations, solving the localization problem will remain one of the most important challenges in robotics. Reliable localization is not simply a navigation requirement—it is the foundation upon which safe, efficient, and scalable autonomy is built.