Warum Roboterlokalisierung in GNSS-freien Umgebungen scheitert
5. Juni 2026
Autonome Roboter transformieren zunehmend Branchen wie Bergbau, Bauwesen, Logistik und Infrastrukturinspektion. Von autonomen Baggern im Tiefbergbau bis zu mobilen Robotern in komplexen städtischen Umgebungen hängen diese Systeme von einer grundlegenden Fähigkeit ab: genau zu wissen, wo sie sich befinden 1. Diese Fähigkeit, Lokalisierung genannt, ist die Grundlage autonomer Navigation. Ohne genaue Lokalisierung können selbst die fortschrittlichsten Wahrnehmungs- und Planungssysteme einen Roboter nicht zuverlässig durch seine Umgebung führen.
Eine der größten Herausforderungen der autonomen Robotik heute ist Lokalisierung in GNSS-freien und GNSS-gestörten Umgebungen. Das sind Umgebungen, in denen satellitengestützte Positionierungssysteme wie GPS, Galileo, GLONASS oder BeiDou nicht verfügbar, unzuverlässig oder stark gestört sind. Beispiele sind unterirdische Minen, Tunnel, dichte städtische Gebiete mit Hochhäusern, Industrieanlagen und große Baustellen. In diesen Umgebungen müssen Roboter auf Bordsensoren zur Positionsschätzung setzen, und kleine Fehler können sich schnell zu schwerwiegenden Navigationsausfällen summieren.
Die Bedeutung der Lokalisierung in der autonomen Robotik
Lokalisierung bezeichnet den Prozess der Bestimmung von Position und Orientierung eines Roboters in seiner Umgebung. Jedes autonome System hängt von Lokalisierung ab, um wesentliche Funktionen wie Navigation, Pfadplanung, Hindernisvermeidung, Kartierung und Aufgabenausführung zu leisten.
Satellitenpositionierungssysteme liefern Robotern eine absolute Referenz für ihren Standort. Solange ein Roboter zuverlässige Satellitensignale empfangen kann, kann er Fehler korrigieren, die sich aus Bordsensoren ansammeln 2. So hält er über lange Strecken und Betriebszeiten eine genaue Positionsschätzung aufrecht.
Wenn GNSS-Signale jedoch ausfallen, verliert der Roboter diese externe Referenz und muss vollständig auf lokale Sensortechnologien wie LiDAR, Kameras, Inertialsensoren (IMUs), Radar und Radodometrie setzen.
Was sind GNSS-freie und GNSS-gestörte Umgebungen?
GNSS-freie Umgebungen sind Orte, an denen Satellitensignale gar nicht empfangen werden können, während GNSS-gestörte Umgebungen Bereiche sind, in denen Signale verfügbar sind, aber erhebliche Ungenauigkeiten aufweisen.
Typische Beispiele:
- Unterirdische Minen
- Tunnel
- Stadtkorridore zwischen Hochhäusern
- Industrieanlagen
- Lagerhallen
- Baustellen
- Dichte Wälder
- Häfen und Terminals
Diese Umgebungen stellen besondere Herausforderungen 3, die genaue Lokalisierung deutlich schwieriger machen als in offenen Außenbereichen.
Lokalisierungsdrift in unterirdischen Minen
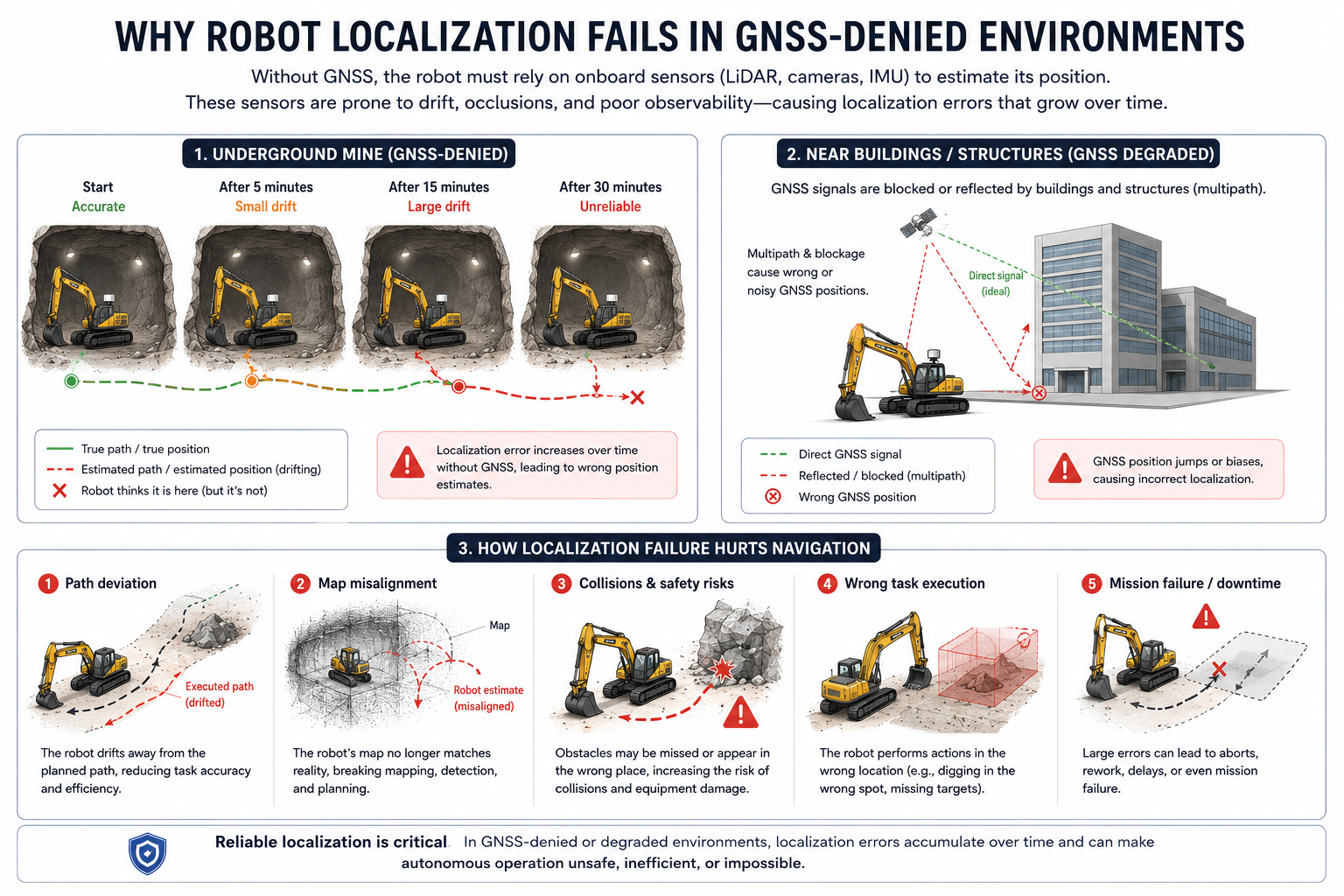
Untertagebergbau gehört zu den anspruchsvollsten Umgebungen für autonome Navigation. Da GNSS-Signale Fels- und Erdschichten nicht durchdringen, arbeitet Bergbauausrüstung ohne satellitengestützte Positionierung.
Ein autonomer Bagger, der einen Tunnel betritt, kann mit einer genauen Positionsschätzung beginnen. Während er sich weiterbewegt, muss er jedoch vollständig auf Bordsensoren setzen. Radencoder messen Bewegung, IMUs schätzen Geschwindigkeits- und Orientierungsänderungen, und Wahrnehmungssysteme versuchen, Umgebungsmerkmale zu erkennen.
Das Problem: Jeder Sensor enthält Messunsicherheit. Raderschlupf, Sensorrauschen, Vibration und Kalibrierfehler führen kleine Ungenauigkeiten in den Lokalisierungsprozess ein. Diese Fehler wirken zunächst unbedeutend, summieren sich aber kontinuierlich über die Zeit.
Dieses Phänomen, Lokalisierungsdrift genannt, lässt die geschätzte Position des Roboters allmählich von der wahren Position abweichen. Nach längerem Betrieb kann der Roboter glauben, sich mehrere Meter von der Realität entfernt zu befinden. In einer Minenumgebung mit Maschinen, Wänden und Personal können selbst relativ kleine Positionsfehler schwerwiegende Folgen haben.
GNSS-Multipath-Fehler nahe Gebäuden
Eine andere, gleich bedeutsame Herausforderung tritt in städtischen Umgebungen auf.
Obwohl Satellitensignale nahe Gebäuden oft verfügbar sind, sind sie nicht immer zuverlässig. Große Bauwerke aus Beton, Stahl und Glas können GNSS-Signale blockieren oder reflektieren, bevor sie den Empfänger erreichen.
Statt eines direkten Signals vom Satelliten kann der Roboter ein reflektiertes Signal empfangen, das einen längeren Weg zurückgelegt hat. Dieses Phänomen heißt Multipath-Ausbreitung.
Weil das reflektierte Signal später als erwartet ankommt, berechnet das Positionierungssystem einen falschen Standort. Das Ergebnis können plötzliche Positionssprünge, anhaltende Verzerrungen oder stark instabile Lokalisierungsschätzungen sein.
Für autonome Roboter nahe Gebäuden können diese Ungenauigkeiten dazu führen, dass Navigationssysteme Entscheidungen auf Basis falscher Positionsannahmen treffen. Selbst wenn GNSS verfügbar scheint, kann die Lokalisierungsqualität durch Signalreflexionen und Abschattung erheblich leiden.
Warum sensorgestützte Lokalisierung nicht perfekt ist
Moderne autonome Roboter nutzen verschiedene Sensoren, um das Fehlen von GNSS auszugleichen. Jede Sensortechnologie hat jedoch Grenzen.
LiDAR-Systeme liefern hochgenaue geometrische Messungen, haben aber Schwierigkeiten bei Staub, Rauch oder Nebel. Kameras bieten reichhaltige visuelle Informationen, sind aber empfindlich gegenüber Lichtverhältnissen und Verdeckungen. IMUs liefern kontinuierliche Bewegungsschätzungen, akkumulieren aber Drift über die Zeit. Radar arbeitet gut unter widrigen Bedingungen, bietet aber meist geringere räumliche Auflösung als LiDAR.
Weil kein einzelner Sensor perfekt ist, müssen Lokalisierungssysteme kontinuierlich Stärken und Schwächen mehrerer Sensormodalitäten ausbalancieren. Selbst ausgefeilte Sensorfusionsalgorithmen können bei besonders schwierigen Umgebungsbedingungen versagen.
Auswirkungen von Lokalisierungsausfällen auf autonome Navigation
Lokalisierungsfehler betreffen jeden Aspekt autonomen Betriebs. Mit sinkender Positionsgenauigkeit verschlechtert sich die Navigationsleistung und Sicherheitsrisiken steigen.
Eine der unmittelbarsten Folgen ist Routenabweichung. Navigationssysteme erzeugen Routen basierend auf der geschätzten Position. Ist diese falsch, kann der Roboter unbemerkt von der geplanten Route abdriften. In Anwendungen wie Bergbau, Bauwesen und Materialhandling können selbst kleine Abweichungen Effizienz reduzieren und Aufgabengenauigkeit beeinträchtigen.
Lokalisierungsausfälle führen auch zu Kartenfehlausrichtung. Autonome Roboter nutzen oft detaillierte Karten, um ihre Umgebung zu verstehen und Navigationsentscheidungen zu treffen. Bei Lokalisierungsdrift 4 passen Sensorbeobachtungen nicht mehr korrekt zu kartierten Merkmalen. Hindernisse erscheinen an falschen Orten, Landmarken stimmen nicht mit Erwartungen überein, und die Umgebungsrepräsentation des Roboters wird zunehmend inkonsistent.
Ein weiteres zentrales Risiko ist Kollisionsgefahr. Autonome Systeme treffen Entscheidungen basierend darauf, wo sie glauben zu sein. Ist diese Annahme falsch, kann der Roboter die Position naher Hindernisse, Maschinen, Infrastruktur oder Personen falsch interpretieren. Das erhöht die Wahrscheinlichkeit unsicherer Manöver und Betriebsvorfälle.
Folgen für autonome Bagger
Lokalisierungsgenauigkeit ist für autonome Bagger besonders kritisch, weil ihre Aufgaben direkte Interaktion mit der physischen Umgebung erfordern.
Ein Bagger mit Lokalisierungsfehlern kann an der falschen Stelle graben, Material aus dem falschen Bereich laden oder vorgegebene Ziele nicht erreichen. In groß angelegten Bergbau- und Bauprojekten können selbst kleine Positionsungenauigkeiten kostspielige Nacharbeit, geringere Produktivität und Betriebsverzögerungen verursachen.
Weil Bagger häufig nahe teurer Ausrüstung, Infrastruktur und menschlichen Arbeitskräften arbeiten, ist zuverlässige Lokalisierung auch eine zentrale Sicherheitsanforderung. Schlechte Lokalisierung kann Kollisionsvermeidungssysteme untergraben und das Vertrauen in autonomen Betrieb mindern.
Mit fortschreitender Automatisierung schwerer Ausrüstung in Bergbau und Bauwesen wird Lokalisierungsleistung zu einem der wichtigsten Faktoren für den Erfolg autonomer Einsätze.
Neue Lösungen für GNSS-freie Lokalisierung
Um die Grenzen von GNSS zu überwinden, haben wir robuste und genaue Lokalisierungstechnologien entwickelt.
Sensorfusion hat sich als einer der vielversprechendsten Ansätze erwiesen. Durch Kombination von Informationen aus LiDAR, Radar, IMUs 5 und Radodometrie 6 können moderne Systeme zuverlässigere Positionsschätzungen erzeugen als jeder einzelne Sensor für sich.
SLAM-Verfahren (Simultaneous Localization and Mapping) 7 ermöglichen Robotern, Karten aufzubauen und gleichzeitig ihre Position darin zu schätzen. Fortgeschrittene radar-basierte Lokalisierungsmethoden verbessern die Leistung bei Staub und geringer Sicht, während maschinelles Lernen Robotern hilft, komplexe Umgebungsmerkmale zu erkennen und sich daran zu lokalisieren.
Unsere Lokalisierungs- und Kartierungspipeline nutzt eine Kombination dieser Technologien, um robuste Lokalisierung selbst unter den anspruchsvollsten Betriebsbedingungen zu erreichen.
Fazit
Lokalisierung ist der Grundpfeiler autonomer Navigation. Ohne genaue Positionsschätzung können Roboter nicht zuverlässig Pfade planen, Hindernisse vermeiden, Aufgaben ausführen oder sicher arbeiten. GNSS-freie und GNSS-gestörte Umgebungen stellen erhebliche Herausforderungen dar, weil sie die absolute Positionsinformation entfernen oder verfälschen, auf die autonome Systeme traditionell angewiesen sind.
In unterirdischen Minen summieren sich Lokalisierungsfehler durch Sensordrift. Nahe Gebäuden können GNSS-Signale blockiert oder reflektiert werden und erhebliche Positionsungenauigkeiten verursachen. Diese Ausfälle können zu Routenabweichungen, Kartenfehlausrichtung, Kollisionen, falscher Aufgabenausführung und Missionsabbruch führen.
Mit zunehmender Verbreitung autonomer Roboter in Bergbau, Bauwesen, Logistik und Industrie bleibt die Lösung des Lokalisierungsproblems eine der wichtigsten Herausforderungen der Robotik. Zuverlässige Lokalisierung ist nicht nur eine Navigationsanforderung — sie ist die Grundlage für sichere, effiziente und skalierbare Autonomie.